近日,國(guó)內(nèi)具身智能商業(yè)場(chǎng)景落地領(lǐng)跑企業(yè)零次方機(jī)器人(Zerith)完成超億元新一輪融資,由國(guó)內(nèi)算力龍頭 AIDC 上市第一股潤(rùn)澤集團(tuán)領(lǐng)投,寧波東力、接力天使、平湖澤新跟投。
零次方機(jī)器人由清華大學(xué) AI&Robot 實(shí)驗(yàn)室核心成員閔宇恒、程頤等 00 后極客于 2025 年 1 月創(chuàng)辦。短短一年多時(shí)間,公司已實(shí)現(xiàn)具身操作基礎(chǔ)模型突破,機(jī)器人單月穩(wěn)定量產(chǎn)百臺(tái),目前訂單數(shù)已突破億元、營(yíng)收數(shù)千萬(wàn)。并在合肥、北京、深圳等城市十余處地標(biāo)場(chǎng)景完成落地驗(yàn)證。
在具身智能的發(fā)展過(guò)程中,存在著 " 偽通用 " — " 去通用 " — " 真通用 " 三階段。" 偽通用 " 階段往往是在過(guò)擬合狀態(tài)下,于受限的演示環(huán)境中表現(xiàn)出有限的泛化能力。而真正的突破要從 " 去通用 " 階段開(kāi)始——即主動(dòng)收斂場(chǎng)景,在可復(fù)制的商業(yè)環(huán)境中,以極高的魯棒性解決真實(shí)問(wèn)題,并在這個(gè)過(guò)程中積累不可替代的核心能力與真實(shí)場(chǎng)景數(shù)據(jù)。只有把多個(gè)‘去通用’的垂直場(chǎng)景深度融合,才能真的走通 " 通用之路 "。
 零次方 " 通用之路 " 路徑示意圖
零次方 " 通用之路 " 路徑示意圖
如圖,當(dāng)下零次方機(jī)器人更聚焦于產(chǎn)品與數(shù)據(jù)的雙重閉環(huán)。在落地場(chǎng)景中,零次方已經(jīng)部署機(jī)器人 E 系列、C 系列等,圖示系列是零次方 "H 系列 " 通用機(jī)器人的高性價(jià)比版本。這些機(jī)器人在特定任務(wù)中實(shí)現(xiàn)了成本與性能的最佳平衡,致力于讓客戶在短期內(nèi)會(huì)獲得清晰、可量化的經(jīng)濟(jì)回報(bào)。
與此同時(shí),成千上萬(wàn)臺(tái)機(jī)器人在真實(shí)商業(yè)場(chǎng)景中持續(xù)運(yùn)行,從而快速積累數(shù)億級(jí)的真實(shí)場(chǎng)景數(shù)據(jù),不斷用于實(shí)現(xiàn)模型性能的突破。每一次場(chǎng)景落地,都為通用智能的進(jìn)化注入真實(shí)數(shù)據(jù)養(yǎng)料;每一筆商業(yè)訂單,都在為零次方通往最終的 " 真通用 " 階段做鋪墊。
4D 增廣數(shù)據(jù),高物理熵與高環(huán)境熵的融合升維
通用具身智能要實(shí)現(xiàn)跨場(chǎng)景泛化,其訓(xùn)練數(shù)據(jù)必須具備 " 高物理熵 " 與 " 高環(huán)境熵 " 兩大特征。以通用家庭場(chǎng)景為例,機(jī)器人需完成多物體泛化操作、適配復(fù)雜背景與動(dòng)態(tài)干擾,其能力核心可拆解為兩類指標(biāo):環(huán)境熵指場(chǎng)景布局、光照、場(chǎng)景任務(wù)規(guī)劃等語(yǔ)義環(huán)境的復(fù)雜度;物理熵對(duì)應(yīng)剛體、柔性體等不同屬性物體動(dòng)靜態(tài)交互的物理規(guī)律復(fù)雜度。而目前環(huán)境熵適配已具備基礎(chǔ)(如 seedance 等視頻生成模型),對(duì)于具身通用來(lái)說(shuō)還需要主攻物理熵,打透底層物理交互一致性。
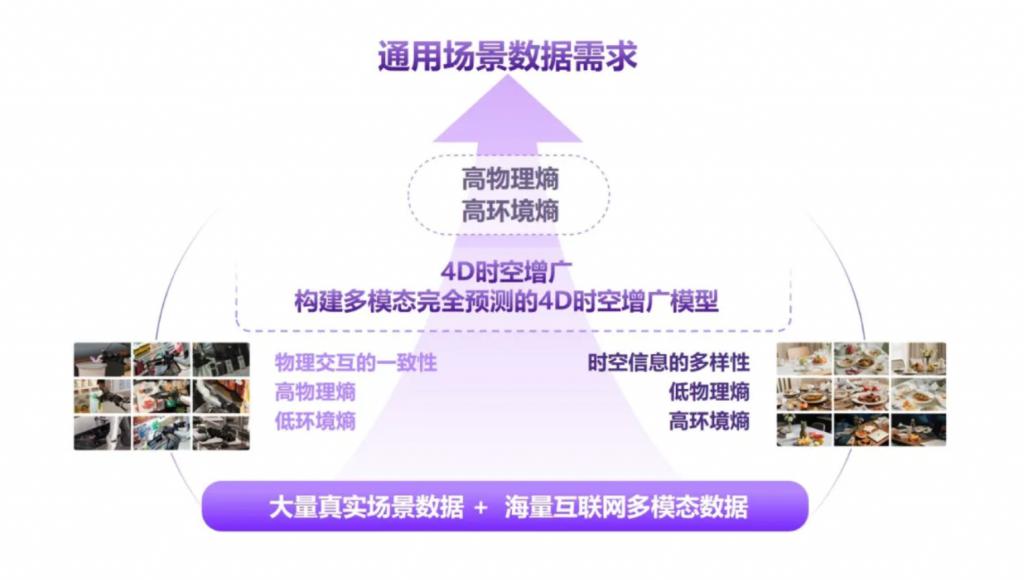 4D 時(shí)空數(shù)據(jù)增廣模型示意圖
4D 時(shí)空數(shù)據(jù)增廣模型示意圖
升維,融合時(shí)空多樣性先驗(yàn): 零次方通過(guò) " 升維 " 來(lái)融合時(shí)空多樣性先驗(yàn)。具體方法:首先,引入海量互聯(lián)網(wǎng)多模態(tài)數(shù)據(jù)(這些數(shù)據(jù)具有 " 高環(huán)境熵、低物理熵 " 的特點(diǎn));然后,依托自研的 4D 增廣模型 ZERITH4D-SDA,將視覺(jué) - 語(yǔ)義層面的時(shí)空多樣性先驗(yàn),與底層的物理一致性規(guī)律進(jìn)行異構(gòu)融合,最終構(gòu)建出能夠進(jìn)行多模態(tài)預(yù)測(cè)的 4D 時(shí)空數(shù)據(jù)增廣模型。
" 類腦 " 具身操作基礎(chǔ)模型,深度復(fù)刻人類認(rèn)知行為邏輯
團(tuán)隊(duì)在 2025 年上半年推出具身操作基礎(chǔ)模型 ZERITH-V0,實(shí)現(xiàn)了場(chǎng)景超長(zhǎng)序列多任務(wù)的突破。而在攻克場(chǎng)景泛化與非結(jié)構(gòu)化交互難題的過(guò)程中,當(dāng)前主流的端到端串行架構(gòu)存在明顯局限,而零次方基于計(jì)算神經(jīng)科學(xué)的跨時(shí)尺度處理機(jī)制與預(yù)測(cè)編碼,自研出類腦雙流異步執(zhí)行架構(gòu) ZERITH-V2,其核心突破在于三大技術(shù):
認(rèn)知 - 行為雙流異構(gòu)網(wǎng)絡(luò):模型解耦為認(rèn)知網(wǎng)絡(luò)負(fù)責(zé)高維語(yǔ)義理解、全局規(guī)劃。行為網(wǎng)絡(luò)負(fù)責(zé)實(shí)時(shí)反應(yīng)推理、高動(dòng)態(tài)柔順力控。
神經(jīng)動(dòng)力學(xué)引擎與異步稀疏調(diào)制:通過(guò)異步稀疏連接解決雙流對(duì)齊與通信開(kāi)銷問(wèn)題,其中,創(chuàng)新神經(jīng)動(dòng)力學(xué)引擎將低頻意圖平滑映射為高頻控制的 " 引力場(chǎng) ",從而同時(shí)保障了底層控制實(shí)時(shí)性與高動(dòng)態(tài)任務(wù)的穩(wěn)定性。
4D 時(shí)空記憶模塊與預(yù)測(cè)編碼網(wǎng)絡(luò):該模塊構(gòu)建 " 三重記憶空間 ",并搭配物理先驗(yàn)預(yù)測(cè)編碼網(wǎng)絡(luò),解決機(jī)器人在長(zhǎng)程任務(wù)中的 " 記憶丟失 " 問(wèn)題,實(shí)現(xiàn)物理動(dòng)態(tài)變化的提前預(yù)測(cè)與補(bǔ)償。
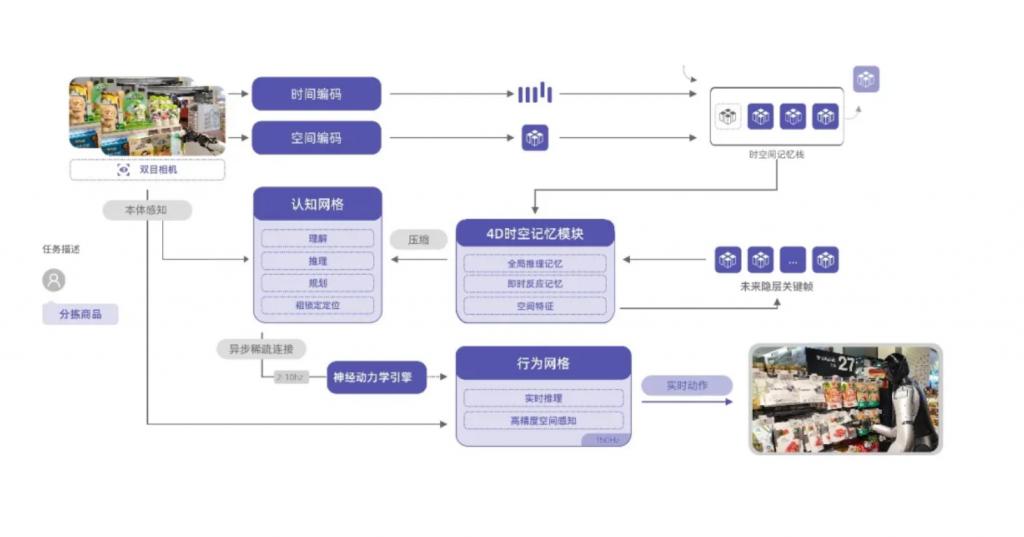 4D 時(shí)空記憶模塊與預(yù)測(cè)編碼網(wǎng)絡(luò)架構(gòu)圖
4D 時(shí)空記憶模塊與預(yù)測(cè)編碼網(wǎng)絡(luò)架構(gòu)圖
該架構(gòu)為零次方在復(fù)雜非結(jié)構(gòu)化場(chǎng)景中的落地應(yīng)用,以及泛化遷移上構(gòu)筑了強(qiáng)大的通用底座。
值得一提的是,2026 開(kāi)年以來(lái),零次方機(jī)器人在剛性需求場(chǎng)景中,已收獲了近億元訂單。當(dāng)下與華潤(rùn)萬(wàn)家、潤(rùn)澤集團(tuán)、商湯集團(tuán)等多家行業(yè)龍頭達(dá)成戰(zhàn)略合作,這也正是穿越 " 偽通用 "、扎實(shí)錨定 " 去通用 " 的階段標(biāo)志。
來(lái)源:獵云網(wǎng)















