站在25年OpenAI所代表的人工智能已有三年、產業(yè)風風火火投AI之際,海豚君通過最近幾篇分析認為,26年AI關鍵是看算力降本、AI投入在軟件和硬件兩側落地。且新硬件落地的機會才是真正的增量機會。
這邊,特斯拉Optimus量產時間正越來越近,人形機器人有望成為承載AI智能的主要載體,并且深刻改變人類的交互和生產力方式。
基于此,海豚君啟動了對機器人產業(yè)鏈的研究。本篇為第一篇,更多是從產業(yè)和基礎研究視角,從上游開始,分析人形機器人在零部件生產和降本上的難度和機會,重點集中在以下幾個問題:
一、人形機器人產業(yè)鏈是由哪些環(huán)節(jié)組成的?
二、這些硬件的產業(yè)化難點?
三、人形機器人硬件機會看什么?
以下是詳細分析
一、人形機器人,生而AI
先說一個基礎概念——人形機器人的兩大核心特征,人的"形體"和人的"大腦"。因為是人形,基本對應有胳膊、腿、頭,能直立行走等核心特征,基本要實現功能多樣性。
而有人的"大腦",核心是多模態(tài)感知能力、持續(xù)學習、和決策能力。人形+類人大腦合起來的目的就是通用性。簡單來說,就是不能只會站著走路,要既會搬箱子,也會煮咖啡,既能搬運重物,也能進工廠打螺絲。
且這些技能不是事先設定好的程序,是可以在與各類外部信息的交互過程中,去持續(xù)學會的,而且在此基礎上,可以獨立作出決策。
要達到人形機器人所需的通用能力,算力、算法、數據、軟硬耦合缺一不可。這兩年的AI算法和GPU/ASIC騰飛,讓算力和算法快速迭代有了可能,但硬件約束與過去截然不同。
手機智能和汽車智能化過程中,由于手機本身有通訊功能、汽車本身有交通功能,不用智能化就具備初始的規(guī)模化出貨量。而人形機器人沒有智能大腦,基本是人形鐵塊,出貨必須以AI大腦為支撐,沒有AI就無法有效出貨。
這導致,人形機器人作為AI時代的全新品類,硬件本身是更大制約:
首先,人形機器人作為新興品牌,硬件的要求與其他產業(yè)存在極大差異,一些硬件需要"無中生有",從頭做起。比如,人形機器人需要具備極其靈敏的"觸覺",但這塊無論是觸覺硬件還是觸覺數據,基本空白。
其次,硬件成本要足夠低,因為很大一部分目的是人力替代,外行所估計的2050年10億人形機器人保有量,對應全球80億總人口和50億全球聯(lián)網人口,沒有買得起的價格,是無法完成類汽車的滲透率的。
二、產業(yè)鏈環(huán)節(jié)拆分:還在零部件"養(yǎng)成期"
按馬斯克預期,單臺機器人售價最好2萬美金以內,和智能電動車的起價水平差不多。同樣差不多地,是機器人高度復雜的產業(yè)鏈。
從產業(yè)鏈角度,可以大體上把行業(yè)分為上游、中游和下游。
1)上游:關注主機廠與上游供應商的合作模式
上游也就是中油玩家主機廠的各類供應商——執(zhí)行器、傳感器、編碼器、控制器/驅動器,以及上述硬件的集成模塊,同時也包括算力設施、算法、芯片等等。
這里想要強調的一點是,人形機器人涉及的硬件環(huán)節(jié),與汽車產業(yè),尤其是新能源汽車產業(yè)重合度較高。那么與新能源車產業(yè)鏈類似,人形機器人的主機廠(類比新能源車主機廠)與供應商的合作模式也是多樣化的。
以特斯拉為例,它既可以直采零部件,自己做模組總成,并組裝成品,也可以采購模組或總成(比如靈巧手、某些身體關機等)。但目前來看,與新能車一樣,供應商提供模組和總成才是與機器人主機廠更主要的合作方式。
2)中游:車廠跨界+全新創(chuàng)業(yè)
主機廠廠商,可以直觀理解為制造和銷售人形機器人的公司。目前來看,主要人形機器人主機廠公司基本集中在中美兩國。
從企業(yè)來看,除特斯拉、小鵬外,基本以創(chuàng)業(yè)公司為主。早期階段,跨界選手不多,但帶"資"進組,實力更強。
 3)下游:終端需求,空間要看產品潛力
3)下游:終端需求,空間要看產品潛力
因當前通用能力不足,目前主要是科研、教育、參觀導覽等專用性場景。工業(yè)和家庭等通用場景潛力大,但目前產品不具備商業(yè)化落地條件。機器人通用化還要多久,是我們后續(xù)會探討的問題,本篇重點通過拆解人形機器人的硬件環(huán)節(jié)來理解上游進展。
三、上游硬核拆解:到底誰是金礦?
馬斯克曾豪言人形機器人是十萬億美金生意,最新透露公司Optimus人形機器人 Gen 3會在26年一季度展示原型機,26年底啟動量產(量產后初步年產量大約5萬臺),但配備的最終年產100萬臺的產線。Optimus 第四代就會有1000萬的產能,第五代可能就是五千萬到1億臺產能。
如果最終特斯拉能攻克下來,機器人的空間很顯然是比較大的。因此海豚君也進入本篇最為核心的上游硬件的價值鏈拆解。這里就以Optimus人形機器人為例。
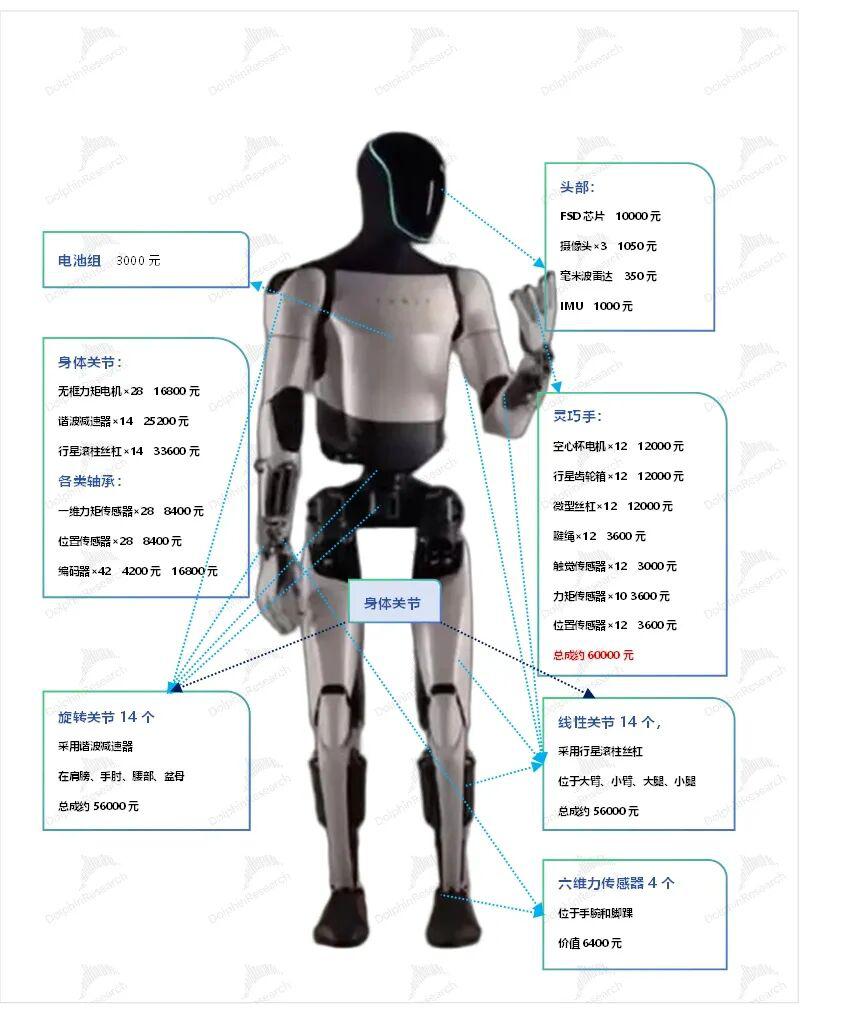
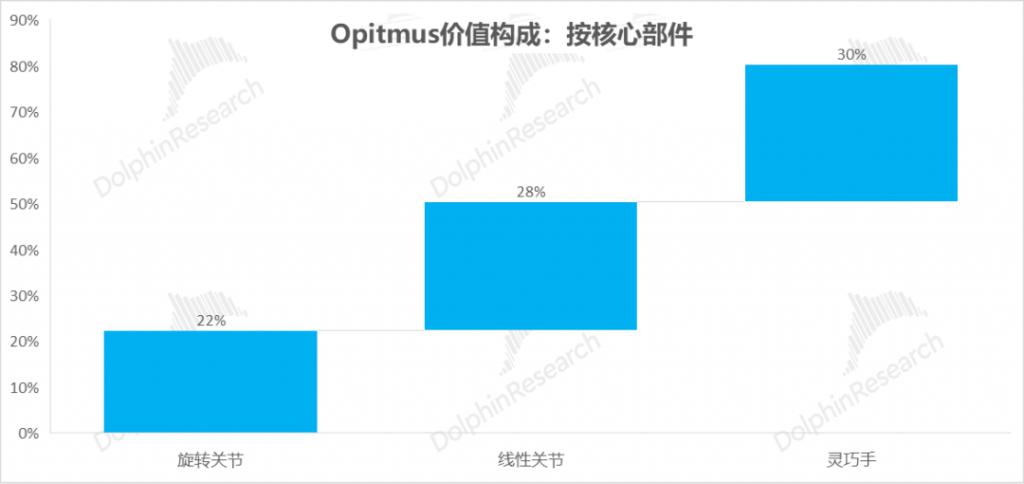
從結構上,Optimus人形機器人可以大體分為頭部、身體關節(jié)以及靈巧手。我們將特斯拉Optimus Gen2的主要部位、涉及到的零部件位置、以及我們估算的在單臺人形機器人當中的成本列示在下圖:
 首先,從技術架構的角度,人形機器人可大致分為感知層、決策層和執(zhí)行層三部分,與智能汽車類似,只是復雜度更高,具體來看:
首先,從技術架構的角度,人形機器人可大致分為感知層、決策層和執(zhí)行層三部分,與智能汽車類似,只是復雜度更高,具體來看:
1)感知層:主要包括各類傳感器和大腦。
大腦主要指人工智能模型,這里先不進行探討。傳感器主要是視覺傳感器、觸覺傳感器、力矩傳感器、位置傳感器等。
① 視覺傳感器:特斯拉采用純2D視覺方案
什么是視覺傳感器?簡單可以理解為人類眼睛,主要用來光信號,實現環(huán)境感知、物體識別和導航定位。
什么方案?這里又有路線之爭。特斯拉采用的是純視覺方案,僅使用2D攝像頭;但多數是多感知方案,包括使用3D相機(技術方案有結構光、TOF、雙目等)、激光雷達,毫米波雷達等。
難在哪里?在人形機器人領域采用的視覺傳感器與在消費電子、新能源車自動駕駛中采用的視覺傳感器在技術路線上并無本質差別,主要是在性能上對動態(tài)性、實時性、集成化和低功耗方面要求較高。
目前,3D相機提供商主要是奧比中光,已與多家國內人形機器人主機廠合作;激光雷達與汽車復用,主要供應商禾賽科技和速騰聚創(chuàng),海豚君對禾賽已有單獨分析,這里不再贅述。
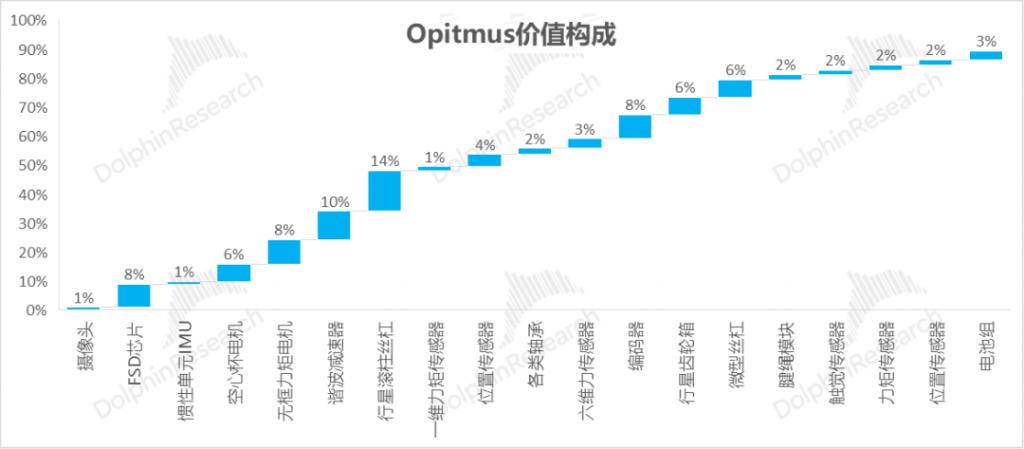
但在特斯拉機器人的價值構成中,由于只需要三個2D攝像頭,一顆攝像頭價值僅350元,在機器人出貨量不大時,很難對供應商形成有效增量。
② 觸覺傳感器:核心瓶頸,技術還未收斂
什么是觸覺傳感器?簡單理解就是人類皮膚,主要用在手部,作用是感知和測量與外界物體進行接觸時產生的相互作用力,包括壓力、紋理、摩擦力、溫度等,所以也被稱為"電子皮膚"。目前是人形機器人硬件環(huán)節(jié)主要難點。
觸覺傳感器是機器人這一新品類下催生的全新領域,其他行業(yè)應用很小,對精度和靈敏度要求很高,還要有一致性、柔性、高可靠性、耐久性以及集成性等特性,目前人形機器人硬件領域需要重點攻克的難點。
比如,精度要求主要受物理原理、微型化集成及動態(tài)響應限制等因素的制約,精度不足可能會使得"信號失真",導致導致大模型學習的是偽規(guī)律。
數據一致性主要受制于制造工藝:批量生產過程中,材料均勻性、工藝參數等的微小波動,都會導致同一批次傳感器的輸出特性存在顯著差異。
此外,傳感器長期使用后的性能漂移也會產生影響,這些因素會導致大模型在訓練時,要么過度擬合,要么噪聲過多,最終會導致泛化失敗。
難在哪里?生產角度,觸覺傳感器壁壘在于材料選擇(敏感材料、柔性電極等),結構設計,制造和封裝工藝(光刻、3D打印等),信號處理算法(需要從單一物理信號解耦除多維要素)等,對生產企業(yè)綜合實力要求較高。
什么方案?主要是壓阻式、電容式等技術方案。壓阻式主要是將電阻變化轉化為電信號,結構相對簡單,但動態(tài)性和一致性都相對較差;電容式主要是將電容量變化轉化為電信號,動態(tài)性和一致性要好于壓阻式,雖然技術成熟度還相對較低,但是預計是未來主要的發(fā)展方向。
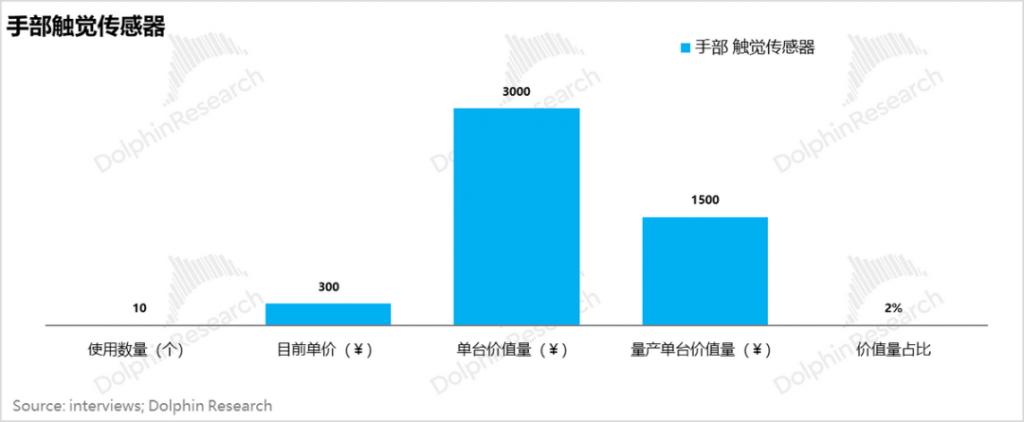
目前價值量占比可能不高,但未來有增加可能性。根據我們的測算,Optimus手部需要使用10個及以上的觸覺傳感器,對應目前單臺人形機器人價值量在3000元,產業(yè)成熟后降本到1500元,在整個人形機器人價值量中占比僅2%。
但這里需要注意的是,目前觸覺傳感器技術路線還未收斂,考慮到未來可能由電容式替代目前壓阻式,且未來還需要滿足陣列化以及多模態(tài)感知等需求,觸覺傳感器的價值量有進一步提升的可能性。
 供應商格局:領先的主要是Novasentis、Tekscan、JDI、Baumer、Fraba等海外企業(yè)、分布在美國、日本等國家。
供應商格局:領先的主要是Novasentis、Tekscan、JDI、Baumer、Fraba等海外企業(yè)、分布在美國、日本等國家。
中國企業(yè)也在加速布局,進展較快的主要有:
柯力傳感,通過投資他山科技、猿聲先達等觸覺傳感器的研發(fā)企業(yè);
漢威科技,已經與多家人形機器人主機廠廠家展開合作,并且進行產線建設;
福萊新材,已經建成中試線,并已經為多家人形機器人主機廠廠家進行供貨等。
③ 力矩傳感器:六維力傳感器是重點,需國產替代
什么是力矩傳感器?主要是測量力和扭矩的傳感器。直觀理解可以想象一下擰瓶蓋的場景:當你擰瓶蓋的時候,會感受到需要多大的力才能把瓶蓋擰開,力矩傳感器就是用來感知它的。普通的一維力矩傳感器的技術壁壘不高,所以這里重點討論六維力傳感器。
什么是六維力傳感器?可以同時測量三個方向上的力和扭矩,在特斯拉Optimus Gen 2上,六維力傳感器總共有4個,分別被放置在手腕和腳踝位置,它是人形機器人運動控制的核心傳感器。
圖:六維力傳感器彈性體結構示意圖
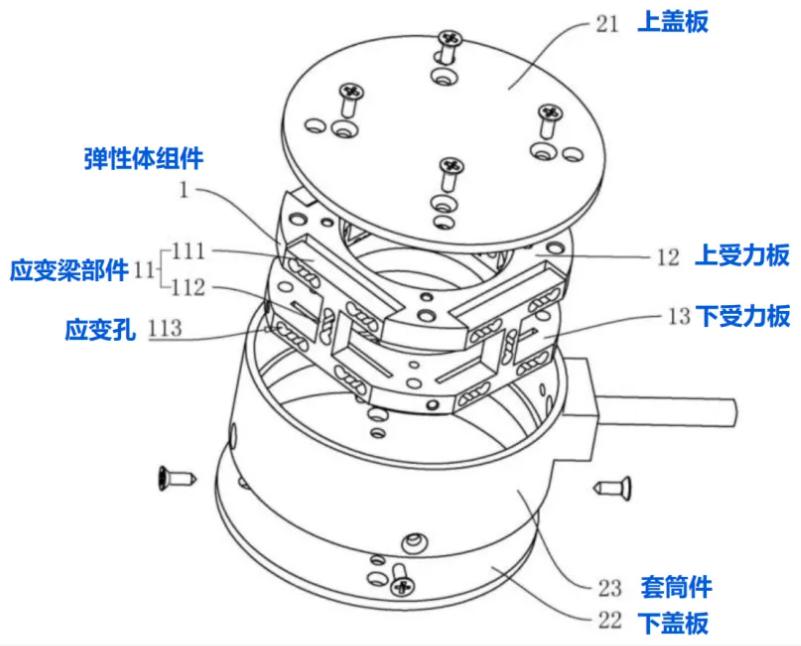 資料來源:海豚研究
資料來源:海豚研究
難在哪里?人形機器人上的六維力傳感器對集成化、動態(tài)性能、過載能力(應對瞬間沖擊的能力)以及精度等都有較高要求。產品壁壘較高,主要難點主要是:
a. 結構設計: 在微小的形變下保持高靈敏度;
b. 解耦算法: 需要從原始信號中解耦出六個維度的力和力矩,并且要規(guī)避各個維度之間的串擾的影響;
c. 貼片工藝: 要克服傳統(tǒng)工藝一致性差的問題;
d. 標定工藝: 通過測試和計算,以確定傳感器輸出信號和實際物理量的準確對應關系,標定維度遠遠多于普通的力矩傳感器等。
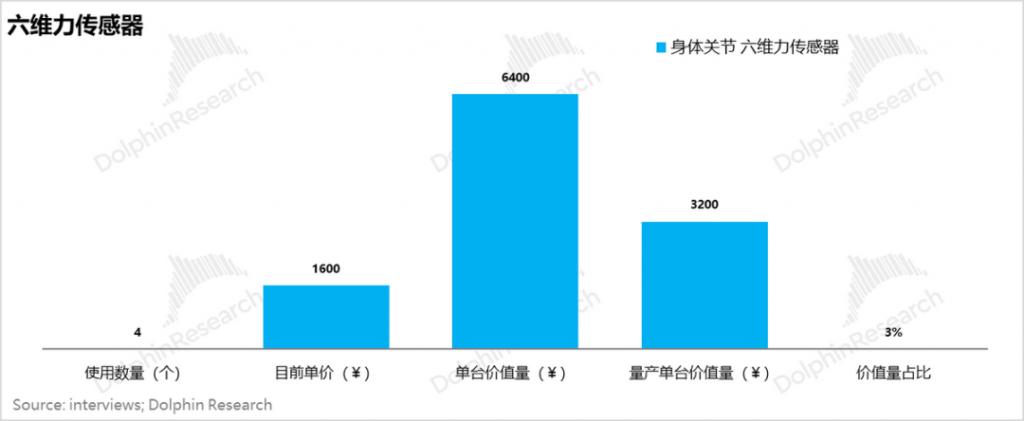
價值量占比不高。根據我們的測算,Optimus需要使用4個六維力傳感器,對應目前單臺人形機器人價值量在5400元,產業(yè)成熟后降本到3200元,在人形機器人當中占比在3%。
 供應商格局:六維力傳感器本身海外是成熟品,但供應商主要是美國ATI,競爭壁壘較高;往后看,降本大概率依賴中國企業(yè),中國進展較快的有柯力傳感、安培龍、凌云股份等,都已經與主機廠合作,部分進入批量訂單階段。
供應商格局:六維力傳感器本身海外是成熟品,但供應商主要是美國ATI,競爭壁壘較高;往后看,降本大概率依賴中國企業(yè),中國進展較快的有柯力傳感、安培龍、凌云股份等,都已經與主機廠合作,部分進入批量訂單階段。
替代風險:這個細分賽道投資的一個關鍵風險是,六維力傳感器的技術難度和高成本,未來不排除可以通過算法升級取代這項傳感器,這是六維力傳感器這個環(huán)節(jié)的重要風險所在。
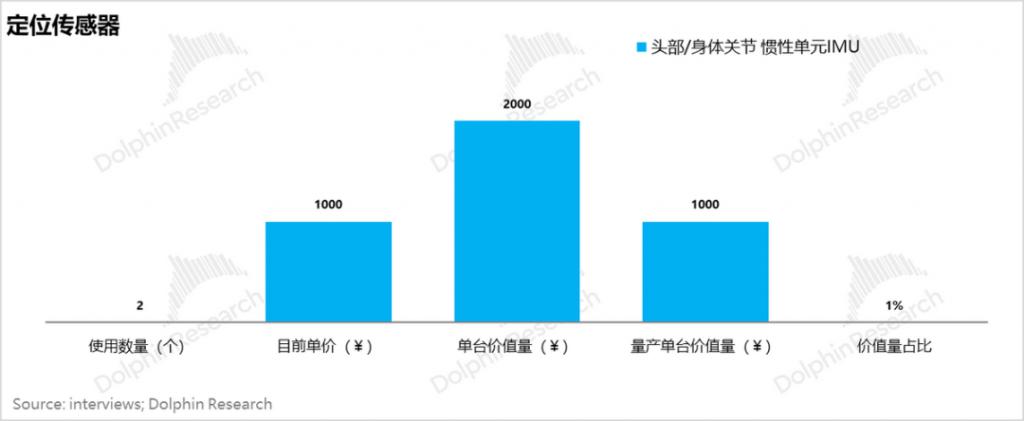
④ 定位傳感器:用量可能大幅增加,高端產品需國產替代
什么是定位傳感器?主要就是慣性測量單元(IMU)。力矩傳感器主要是用來感受"力",而IMU主要是用來感受"位置"。核心組件包括加速度計、陀螺儀等,用來測量加速度和角速度,服務于人形機器人的姿態(tài)估計、平衡控制和運動狀態(tài)測量,同樣是人形機器人進行運動控制的主要傳感器。
目前特斯拉人形機器人可能采用2顆及以上IMU主控芯片,但未來可能更多,以通過冗余配置來提升容錯能力。
圖:加速度計和陀螺儀
 資料來源:Innalabs公司,海豚研究
資料來源:Innalabs公司,海豚研究
圖:IMU結構示意圖
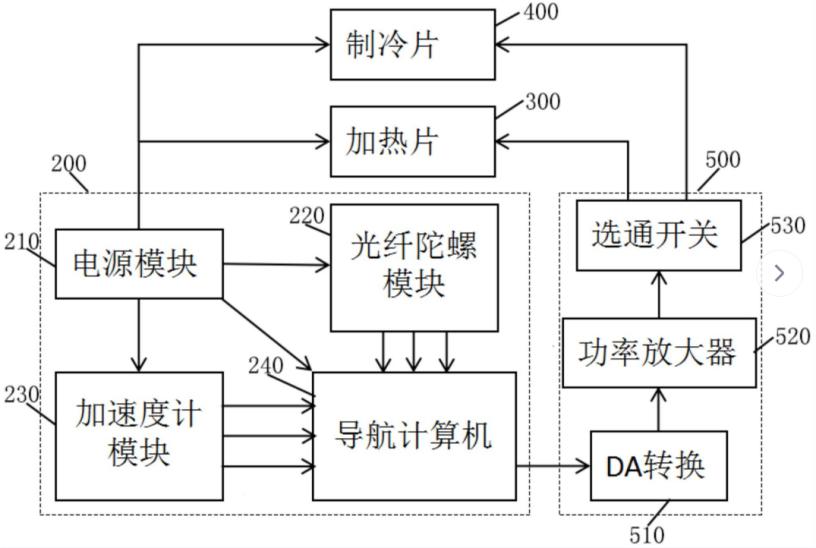 資料來源:某IMU專利,來自株洲菲斯羅克光科技股份有限公司,海豚研究
資料來源:某IMU專利,來自株洲菲斯羅克光科技股份有限公司,海豚研究
難在哪里?人形機器人需要的IMU同樣對精度(加速度計的零偏穩(wěn)定性,和陀螺儀的角度隨機游走)有極高要求,標準遠高于消費電子產品,并且對于制造工藝、融合算法也有較高要求。
國產化進展:IMU也是成熟產品,但高端IMU(工業(yè)級、車規(guī)級、戰(zhàn)術級)由博世、霍尼韋爾等歐美企業(yè)把控,同樣有比較好的競爭壁壘。同時國內企業(yè)也取得一定進展,主要企業(yè)包括芯動聯(lián)科(已經具備工業(yè)級的成熟產品)、華依科技(已經向人形機器人主機廠廠商供貨)等。
價值量有大幅提升可能性。根據我們的測算,Optimus目前方案僅使用2個主控IMU,對應目前單臺人形機器人價值量在8400元,產業(yè)成熟后降本到4200元,在人形機器人當中占比在4%。但考慮到技術路線迭代,未來價值量有大提升的可能性。
 2)決策層:主要指大腦人工智能模型,主要是AI半導體相關,這里暫不分析,未來做單獨分析。
2)決策層:主要指大腦人工智能模型,主要是AI半導體相關,這里暫不分析,未來做單獨分析。
3)執(zhí)行層:主要指小腦和執(zhí)行器。
小腦主要是指運動控制系統(tǒng),可以看作是大模型之下的小模型。
而執(zhí)行器關鍵是在關節(jié)(包括線性關節(jié)和旋轉關節(jié))和靈巧手(可看作由更精密的關節(jié)構成)。其中,線性關節(jié)主要由電機和絲杠構成,旋轉關節(jié)主要由電機和減速器構成。
① 電機:價值量大,降本靠中國
無論身體關鍵還是手部關節(jié),無論是旋轉關節(jié)還是線性關節(jié),都需要使用到電機。
為什么?目前,人形機器人都是電驅動。早年間,液壓、氣動等技術路線也被嘗試采用過(比如當年很火的波士頓動力),但因精度不高,核心bug是難以與電控系統(tǒng)集成,與智能化沖突。
人形機器人電機特別在哪?電機的種類五花八門,目前特斯拉人形機器人的身體關節(jié)主要使用無框力矩電機,靈巧手主要使用空心杯電機,未來可能過渡到微型無框力矩電機。
無框力矩電機的優(yōu)勢是可以在受限空間內滿足大扭矩、高精度、高功率密度、快速響應、高可靠性、輕量化、集成化、小型化以及相對較低成本等。而空心杯電機能夠滿足在靈巧手極小空間下滿足性能要求。
拆解一下這兩種電機的結構,以更直觀地理解:
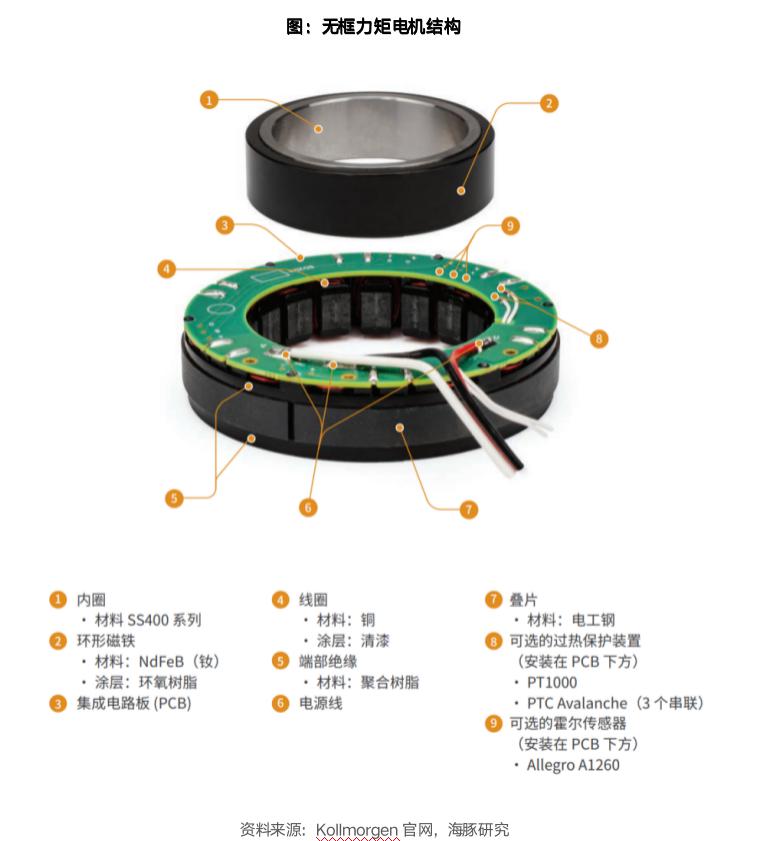 無框力矩電機,從名字上就可以簡單理解它的結構:與傳統(tǒng)電機的差異點在于,無框力矩電機取消了外殼、軸等機械機構,從外形來看,只有圓環(huán)狀的轉子和外部的定子。
無框力矩電機,從名字上就可以簡單理解它的結構:與傳統(tǒng)電機的差異點在于,無框力矩電機取消了外殼、軸等機械機構,從外形來看,只有圓環(huán)狀的轉子和外部的定子。
其中,轉子由環(huán)形磁鐵和鋼圈組成,可以直接跟關節(jié)的主軸集成在一起,定子由疊片和銅線圈等部件組成,可以直接與機器的外殼結合在一起。
這種結構取消了傳統(tǒng)電機的冗余結構,不需要一系列的傳統(tǒng)部件,因此具有集成化、高功率密度以及高響應速度的優(yōu)勢,可以滿足人形機器人輕量化、高負載、高動態(tài)、高精度、輕量化和高可靠性等要求,因此成為目前人形機器人身體關節(jié)主流驅動方案。
圖:空心杯電機結構
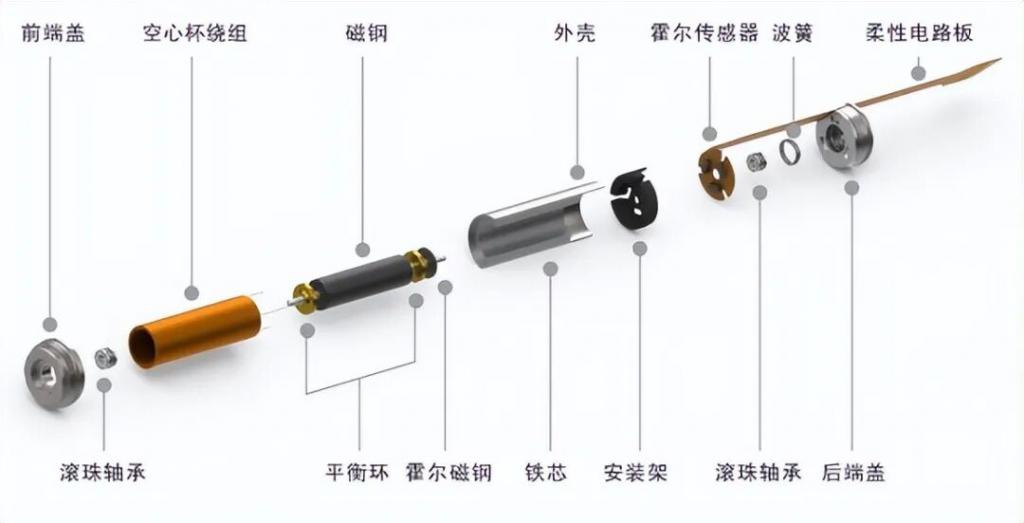 資料來源:鳴志電器官網,海豚研究
資料來源:鳴志電器官網,海豚研究
空心杯電機的名字來源于它的轉子的特殊結構:與傳統(tǒng)電機相比,空心杯電機的最大特點在于轉子沒有鐵芯,而是由漆包線繞制成一個杯狀的自支撐線圈,形狀像水杯。而空心杯電機的定子則是由永磁體構成。
無鐵芯的設計可以降低鐵芯結構所帶來的不穩(wěn)定的問題(齒槽效應),同時可以消除鐵芯所帶來的各種損耗,并且可以大幅降低電機質量,因此具有結構緊湊、運行平穩(wěn)(卡頓、震動以及有噪音的情況極少)、動態(tài)響應快、高效率低發(fā)熱、高功率密度等優(yōu)勢。
應用在人形機器人靈巧手當中,可以滿足靈巧手對于高集成度(因為空間極其狹小)、高精度和高穩(wěn)定性(尤其是體現在抓取這個動作上)、高動態(tài)響應以及高可靠性的要求。
難點在哪里?傳統(tǒng)電機技術已經極其成熟,但高端產品中國還不成熟。無框力矩電機的磁路設計、組裝工藝、材料選擇、結構設計等有難度;空心杯電機線圈設計、線圈繞制工藝有難度,但整體上,這種難度是可以攻克的。
價值量有多少?根據我們的測算,Optimus需要使用多達40個電機,對應目前單臺人形機器人價值量在28800元,產業(yè)成熟后降本到14400元,在人形機器人當中占比達到14%,成本占比明顯高于上述傳感器。
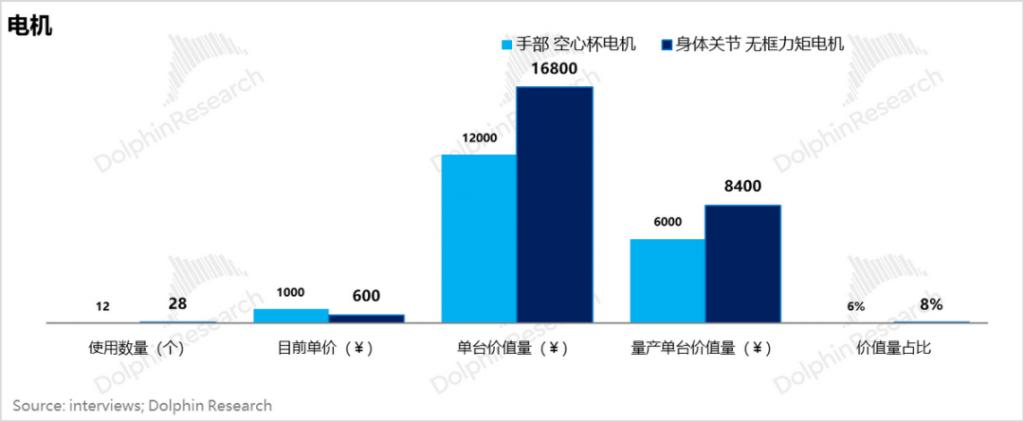 行業(yè)格局:無框電機領域有美國的Kollmorgen、德國的TQ-RoboDrive、瑞士的Maxon等;空心杯電機領先企業(yè)主要有瑞士的Maxon、Portescap、德國的Faulhaber等。
行業(yè)格局:無框電機領域有美國的Kollmorgen、德國的TQ-RoboDrive、瑞士的Maxon等;空心杯電機領先企業(yè)主要有瑞士的Maxon、Portescap、德國的Faulhaber等。
目前中國公司有步科股份(無框力矩電機龍頭,在工業(yè)和協(xié)作機器人領域已批量銷售產品,并已經開始給人形機器人主機廠供貨)、鳴志電器(空心杯電機技術領先)、偉創(chuàng)電氣(空心杯電機已經具備量產能力,已與海外客戶對接)、兆威機電(空心杯電機已經與海外客戶開展前期合作)、臥龍電驅(無框力矩電機已經向國內主機廠廠商供貨)、雷賽智能(已經具備成熟的無框力矩電機和空心杯電機產品)、三花智控(自主研發(fā)無框力矩電機)等技術已經較為成熟。
② 絲杠:成為主流方案概率較大,是主要的需國產替代的環(huán)節(jié)
身體關節(jié)為什么要分線性關節(jié)和旋轉關節(jié)?手腕、肩膀,還是膝蓋、腳踝,它們的運動都可以類比為旋轉運動,并且有些關節(jié)可以在好幾個空間維度上進行旋轉,因此機器人必備。
a. 旋轉關節(jié)的運動方式是圍繞某個點進行旋轉,
b. 線性關節(jié)的運動方式是沿著某條直線進行線性運動。人形機器人的部分位置采用線性執(zhí)行器,可以解決某些旋轉執(zhí)行器可能存在的弊端。
人在通過腿部進行跳躍的時候,肌肉的收縮更傾向于是一種線性運動,那么人形機器人也可以模擬這一運動過程;且相對旋轉執(zhí)行器,輸出力矩更精確、更節(jié)能(不運動的時候電機不啟動)、結構更具剛性(更抗沖擊)等優(yōu)勢(尤其是行星滾柱絲杠),這幾點待我們在下文將絲杠的結構拆解以后,可以更加直觀地進行理解。
什么是絲杠?就是把電機旋轉運動轉化為直線運動的機械裝置,主要的組成部件是中間的螺桿和外部的螺母。想象一下,用螺絲刀擰螺絲釘的過程:旋轉螺絲刀,螺絲釘就會按直線釘入。
絲杠的工作模式也是類似的,電機帶動外圈的螺母運動,而螺母通過滾柱,作用于螺桿上的螺旋槽,最終帶來螺桿進行直線運動。
相對較為傳統(tǒng)的滾珠絲杠而言,行星滾柱絲杠的優(yōu)勢在于承載力和剛度更高(因為由滾珠的點接觸變成了滾柱的線接觸),推力更大,且具備自鎖性(不運動的時候電機不需要啟動)匹配人形機器人需求。
但與此同時,行星滾柱絲杠的技術難度更高,主要是對精度要求更高,同時對合金材料性能要求更高,因此對熱處理工藝、精密磨削工藝的要求極高,目前螺紋磨床設備完全依賴進口。
圖:滾珠絲杠結構示意
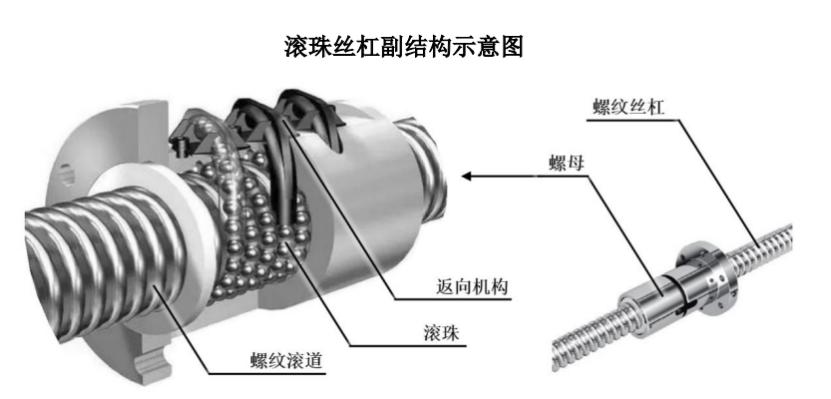 資料來源:南京化纖公告,海豚研究
資料來源:南京化纖公告,海豚研究
圖:行星滾柱絲杠結構示意
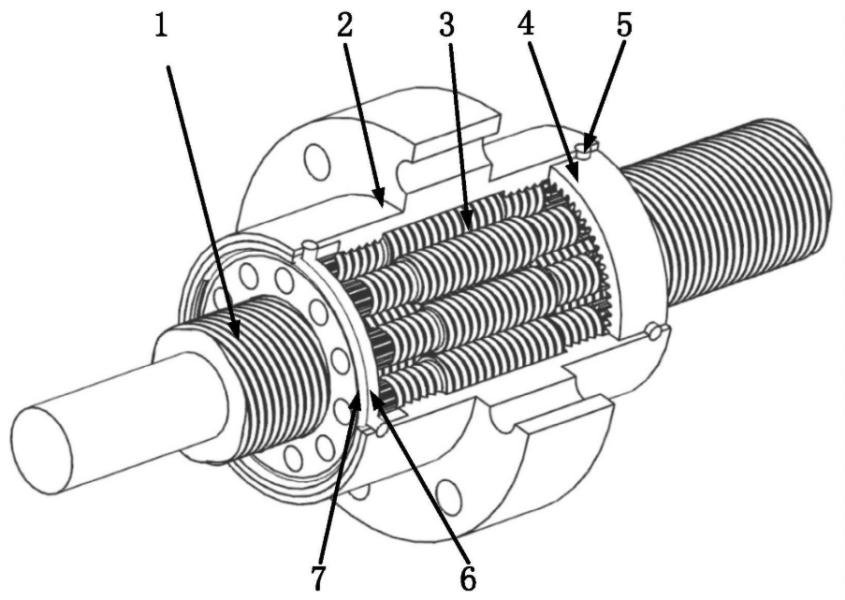 (備注:1為螺桿,2為螺母,3為滾柱)
(備注:1為螺桿,2為螺母,3為滾柱)
資料來源:某行星滾柱絲杠專利,來自中國船舶重工集團公司第七0四研究所,海豚研究
圖:行星滾柱絲杠
 資料來源:北特科技官網,海豚研究
資料來源:北特科技官網,海豚研究
應用在人形機器人上的絲杠是全新領域:應用端,之前行星滾柱絲杠主要應用于航空航天、軍工以及某些重型工業(yè)領域。人形機器人上,產研要求側重精度(要求在C5以上)、尺寸、功率密度、動態(tài),同時對成本也更高敏感,更加劇了應用于人形機器人的行星滾柱絲杠產品的開發(fā)難度。
目前國內主機廠選絲杠路線的相對較少,仍然主要使用旋轉關節(jié),這主要基于控制難度等原因。但考慮到絲杠優(yōu)勢,長周期有采用趨勢,而特斯拉身體關節(jié)當前采用行星滾柱絲杠,靈巧手采用滾珠絲杠,但不排除未來更換技術路線,另有部分國內企業(yè)身體關節(jié)也暫時采用滾珠絲杠。
價值量占比?單價2400元,但是用量較大,絲杠簡直了占到了機器人總價值量的20%(考慮身體需要使用14個行星滾柱絲杠,手部需要使用12個微型滾珠絲杠)。這個也是單一零部件價值量最大的環(huán)節(jié),而且本身從生產工藝和生產設備都有難度,是一個需要重點關注的細分賽道。
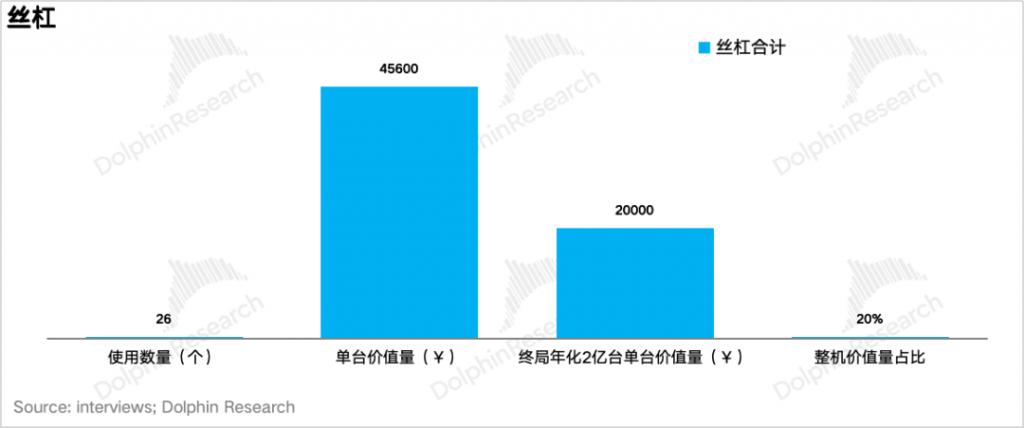 行業(yè)格局:目前在絲杠領域仍是日歐企業(yè)保持領先,主要是日本的THK、NSK、德國的舍弗勒(行星滾柱絲杠領先)、中國臺灣的上銀科技等。
行業(yè)格局:目前在絲杠領域仍是日歐企業(yè)保持領先,主要是日本的THK、NSK、德國的舍弗勒(行星滾柱絲杠領先)、中國臺灣的上銀科技等。
中國進展較快的企業(yè)有恒立液壓(能夠生產行星滾柱絲杠,已與北美客戶建立初步合作),新劍傳動(與多家主機廠廠商開展合作)、五洲新春(主要提供前道工藝,是新劍科技及海外龍頭的供應商)、浙江榮泰(并購KGG,其具備行星滾柱絲杠生產能力)、北特科技、震裕科技、雙林科技、雙環(huán)傳動等。
除了本身工藝難,生產設備上需要磨床來生產螺桿上的螺紋,這個磨床設海外成熟,但中國生產有難度。國內有希望突破磨床生產技術的設備公司主要有秦川機床、華辰裝備、浙海德曼等。
③ 減速器:價值量也大,國產替代不足
與線性關節(jié)不同,旋轉關節(jié)主要使用減速器作為傳動裝置。減速器是通過齒輪等內部轉動,將電機輸出的高轉速、低扭矩的動力轉換為高精度、低轉速、高扭矩(高負載)的動力。原理類似扳手擰螺絲的過程。從類型上看,應用在人形機器人上的減速器主要有行星減速器、諧波減速器、擺線減速器等。
圖:行星減速器
 資料來源:臺灣普尼柯科技有限公司,海豚研究
資料來源:臺灣普尼柯科技有限公司,海豚研究
行星減速器主要是通過行星齒輪進行傳動,優(yōu)勢是重負載、高扭矩和抗沖擊,因此比較多地應用在人形機器人的下肢。目前特斯拉人形機器人手部也暫用行星減速器,主要基于成本考量,未來不排除改變技術方案。
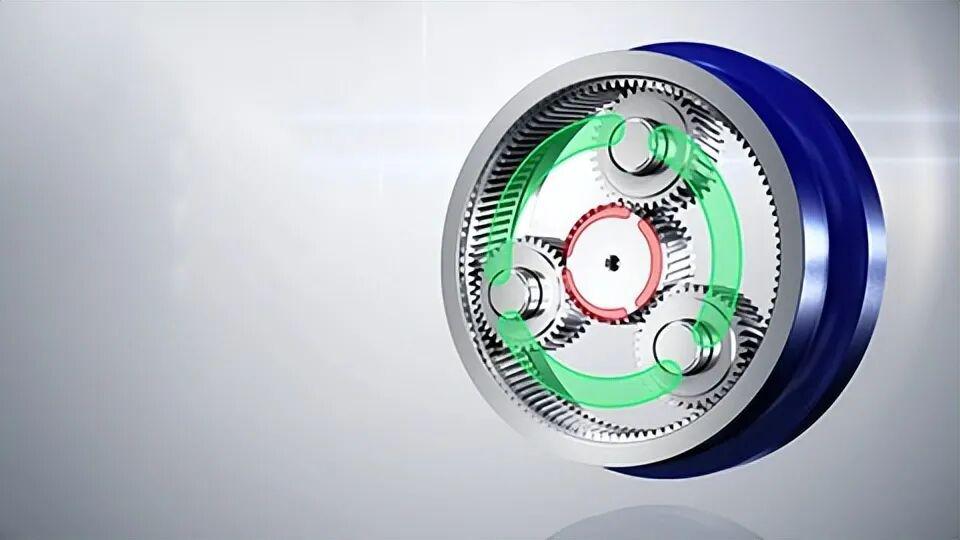
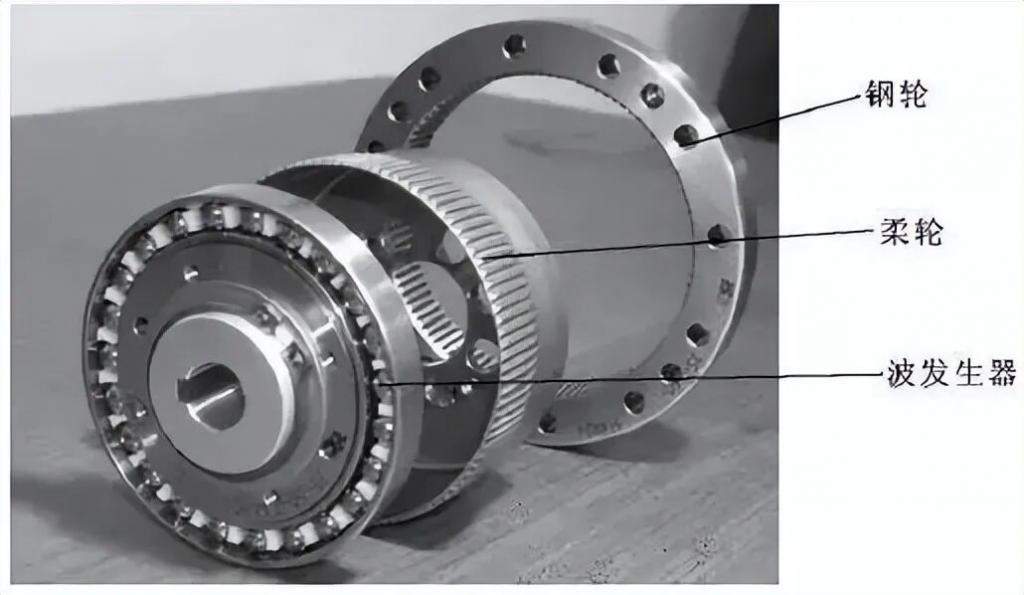
圖:諧波減速器結構示意圖
 資料來源:機器人網,海豚研究
資料來源:機器人網,海豚研究
諧波減速器主要由波發(fā)生器、柔輪和鋼輪組成。波發(fā)生器是讓柔輪發(fā)生彈性形變,然后柔輪齒與外側的鋼輪齒會在不同位置持續(xù)發(fā)生嚙合和分離。這個過程中,柔輪與鋼輪的嚙合位置會不斷發(fā)生變化,最終導致柔輪相對于鋼輪發(fā)生緩慢旋轉。
諧波減速器的優(yōu)勢是極高傳動比、精度高且體積小,但承載力和抗沖擊力有限,因此較常用在上肢。
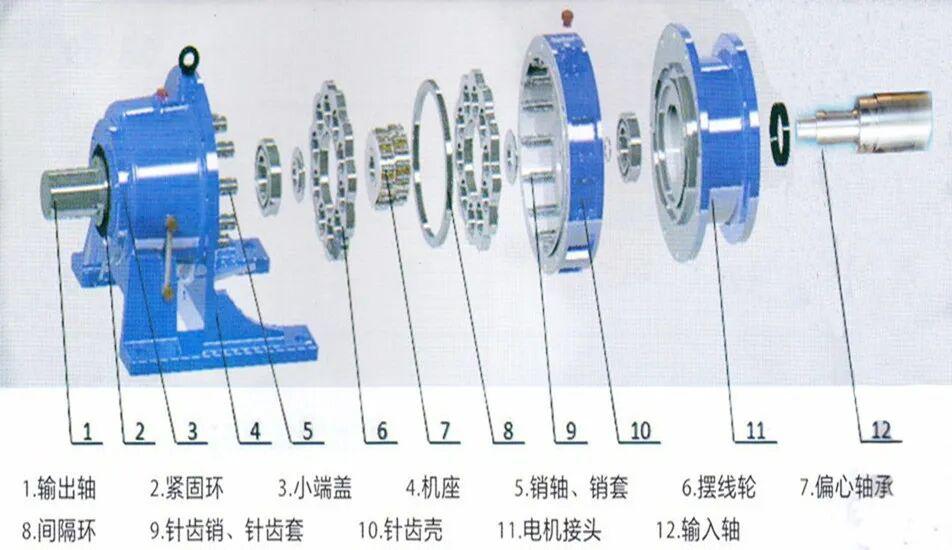
圖:擺線減速器結構示意圖
 資料來源:國貿集團產品介紹,海豚研究
資料來源:國貿集團產品介紹,海豚研究
RV減速器是一種復合結構,傳動結構分兩級,一級是行星齒輪,一級是擺線針輪。擺線針輪減速,通過輸入軸帶動偏心軸(曲柄軸),使擺線輪在針齒輪內既公轉又自轉(自轉轉速即為輸出轉速),從而實現高傳動比。
RV減速器的優(yōu)勢是同時具備高承載、高精度和高傳動比的優(yōu)勢,但結構極其復雜,生產難度較高、成本較高。擺線減速器可以看作RV減速器的簡化版本,具備RV減速器的部分優(yōu)勢,同時結構更加緊湊。目前特斯拉主要采用諧波減速器,未來可能在部分位置采用擺線減速器。
表 主機廠公司身體關節(jié)使用減速器和絲杠的情況
 價值量占比?目前諧波減速器在特斯拉Optimus中的價值量占比達到了16%,僅次于絲杠。而且技術難點也比較大,例如諧波減速器目前主要由日企哈默納科掌握。
價值量占比?目前諧波減速器在特斯拉Optimus中的價值量占比達到了16%,僅次于絲杠。而且技術難點也比較大,例如諧波減速器目前主要由日企哈默納科掌握。
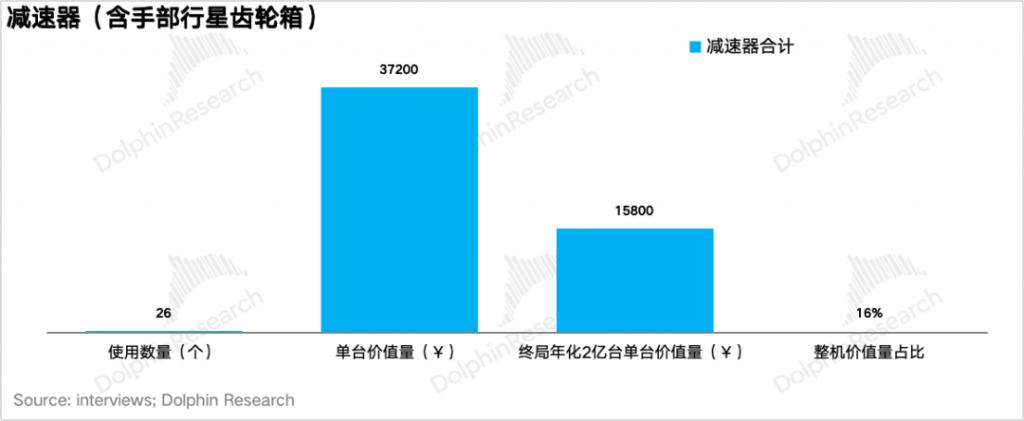 行業(yè)格局:目前高端行星減速器、諧波減速器和RV減速器均由日德企業(yè)主導,典型如日本的哈默納科在諧波減速器領域占據全球一半以上市場,斷層領先。減速器在性能上強調精度、承載力、一致性、壽命等,難點主要集中在材料(比如諧波減速器需要高性能的特殊合金鋼以生產柔輪)、齒輪加工工藝(需達到極高精度)、高性能零部件(如軸承等,生產難點在熱處理等環(huán)節(jié))、設計仿真能力(齒形設計、力學模型等)等。
行業(yè)格局:目前高端行星減速器、諧波減速器和RV減速器均由日德企業(yè)主導,典型如日本的哈默納科在諧波減速器領域占據全球一半以上市場,斷層領先。減速器在性能上強調精度、承載力、一致性、壽命等,難點主要集中在材料(比如諧波減速器需要高性能的特殊合金鋼以生產柔輪)、齒輪加工工藝(需達到極高精度)、高性能零部件(如軸承等,生產難點在熱處理等環(huán)節(jié))、設計仿真能力(齒形設計、力學模型等)等。
中國進展:高端品初步國產替代,國內綠的諧波(在諧波減速器領域已經與北美客戶建立初步合作)、中大力德(具備行星、諧波、RV等生產能力)、雙環(huán)傳動(RV減速器龍頭)等進展較快。
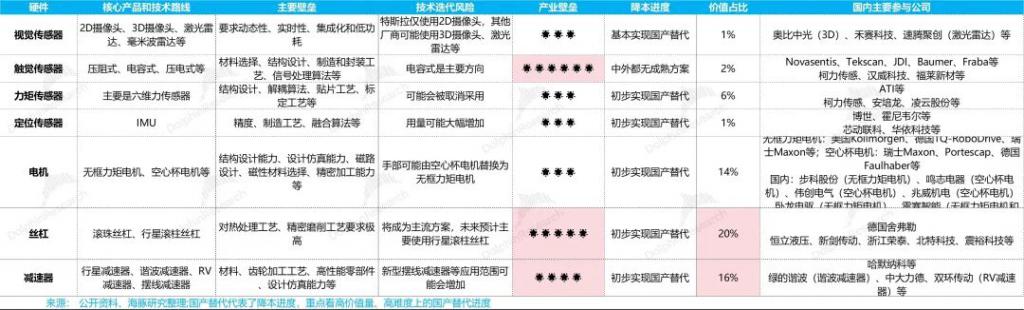
總結:難點在觸覺,機會在絲杠和減速器
通過以上梳理,按照價值量占和行業(yè)進入壁壘兩個維度來看的話,人形機器人最難的環(huán)節(jié)是機器人催生的全新產業(yè)需求——電子皮膚,也就是觸覺傳感器。
而價值量較大,且行業(yè)本身有工藝或者設備難度的,主要是兩個關節(jié)部件,一個是線性關節(jié)需要的絲杠,另外一個是旋轉關節(jié)所需的減速器。
海豚君整理如下:
 此外,人形機器人并未進入產業(yè)化量產的階段,技術路線并未收斂,以上分析主要基于當前主流技術路線,不排除未來技術路線發(fā)生變化,導致新的硬件的出現或者部分硬件被替代。
此外,人形機器人并未進入產業(yè)化量產的階段,技術路線并未收斂,以上分析主要基于當前主流技術路線,不排除未來技術路線發(fā)生變化,導致新的硬件的出現或者部分硬件被替代。
要注意的是,產業(yè)鏈環(huán)節(jié)的角度,總成也是硬件的一個核心環(huán)節(jié)。比如,靈巧手總成的產業(yè)化難度高于諸如絲杠、減速器等零部件,但靈巧手的壁壘不只是工業(yè)制造,同時還涉及軟件和軟硬件耦合,下篇會詳細討論。
來源:海豚研究















